TP - Refactoring de traitement de graphe
Introduction
Dans ce TP, l'idée est de se mettre en situation où nous devons industrialiser un prototype. Nous allons réfactorer une application qui charge un graphe et calcule le plus court chemin entre deux sommets.
L'application se présente sous la forme d'une API basée sur spring boot avec un démonstrateur OpenLayers :
Objectifs
Les objectifs sont les suivants :
- Rendre le code plus robuste
- Améliorer les entrées/sorties du programme
- Optimiser le chargement du graphe
- Optimiser le calcul de plus court chemin
- Ajouter une fonctionnalité de calcul d'isochrone
Pour cela, nous procéderons par étape.
Démarrage
- Forker le projet https://github.com/mborne/tp-graph-java
- Cloner le fork
- Lire le fichier README pour :
- Découvrir l'organisation du code
- Construire le projet et exécuter les tests
- Démarrer et tester l'API et son démonstrateur
Mises en garde
Le TP a été modifié par rapport aux sessions précédentes (vous ne devez pas exploiter les forks existants). En outre, vous devrez impérativement :
- Livrer un code fonctionnel sur la branche par défaut de votre fork.
- Avoir au moins un commit (voire une branche) par question avec un commentaire permettant de l'identifier.
Pour ce faire, il vous est vivement conseillé de :
- Lancer à chaque étape la construction et les tests automatiques (
mvn clean package). - Compléter ces tests automatiques avec un test manuel sur l'API.
0.1 - Blindage de la construction des arcs
Nous remarquons que le modèle ne protège pas contre les erreurs la création des sommets et des arcs. Il est tout à fait possible de créer par erreur un Edge avec une source ou une target nulle.
Nous procédons comme suit :
- Ajout d'un constructeur
Edge(source: Vertex, target: Vertex) - Suppression du constructeur par défaut sur
Edge
0.2 - Ajout de fabriques pour les sommets et les arcs
En ajoutant un constructeur Edge(source: Vertex, target: Vertex), nous remarquons que nous avons simplifié la création des arcs et des sommets.
Toutefois, les opérations de création demeurent complexes et il reste la possibilité d'oublier d'ajouter les éléments aux listes de vertices et edges du graphe.
Nous allons donc procéder comme suit :
- Ajout d'une fabrique
createVertex(coordinate: Coordinate, id: String): VertexdansGraph - Ajout d'une fabrique
createEdge(source: Vertex, target: Vertex, id: String): EdgedansGraph - Masquage des constructeurs
Vertex()etEdge(source,target)
Ainsi, à l'usage, nous passerons de :
Vertex a = new Vertex();
a.setId("a");
a.setCoordinate(new Coordinate(0.0, 0.0));
graph.getVertices().add(a);
Vertex b = new Vertex();
b.setId("b");
b.setCoordinate(new Coordinate(1.0, 0.0));
graph.getVertices().add(b);
Edge ab = new Edge(a, b);
ab.setId("ab");
graph.getEdges().add(ab);
à
Vertex a = graph.createVertex(new Coordinate(0.0, 0.0),"a");
Vertex b = graph.createVertex(new Coordinate(1.0, 0.0),"b");
graph.createEdge(a,b,"ab");
0.3 - Géométrie réelle des tronçons
Nous remarquons au niveau de getCost et getGeometry que la géométrie des tronçons est un segment entre le sommet source et le sommet cible. La géométrie réelle est lue dans GraphReader mais elle n'est pas exploitée lors de la création du graphe.
Nous allons procéder comme suit pour ajouter la géométrie réelle des tronçons de route sur les Edge :
- Ajout d'un attribut
geometry: LineStringsur la classeEdgeavec un settersetGeometry(geometry: LineString) - Mise à jour de
getGeometry()pour renvoyer l'attributgeometrys'il est défini - Mise à jour de
getCost()pour renvoyer la longueur de la géométrie à l'aide de getLength de JTS - Mise à jour de
GraphReaderpour stocker la géométrie sur lesEdgeà l'aide desetGeometry
0.4 - Indexation des arcs entrants et sortants
En lisant attentivement DijsktraPathFinder (ou un utilisant un outil de profilage tel VisualVM), nous remarquons que la méthode graph.getOutEdges(vertex: Vertex) est appelée très fréquemment dans la méthode visit(vertex: Vertex).
Cette approche étant loin d'être optimale, nous allons indexer les arcs sortants et entrants comme suit :
- Suppression de
setSourceetsetTargetdansEdge(1) - Ajout des attributs
inEdges: List<Edge>etoutEdges: List<Edge>surVertex(2). - Ajout des getters
getInEdges(): List<Edge>etgetOutEdges(): List<Edge>surVertex - Remplissage automatique de
inEdgesetoutEdgesdans le constructeurEdge(source,target) - Ré-écrire
Graph.getInEdgesetGraph.getOutEdgespour appelerVertex.getInEdgesetVertex.getOutEdges - Exclure
inEdgesetoutEdgesdu rendu JSON au niveau de l'API à l'aide de l'annotation@JsonIgnore(3).
Remarques :
- (1) Nous n'avons pas besoin d'éditer les graphes après chargement, il est donc inutile de conserver
setSourceetsetTargetqui complexifieraient la gestion deinEdgesetoutEdges. - (2) Nous n'avons pas besoin pour l'algorithme actuel des
inEdgesmais nous choisissons de conserver une symétrie dans le modèle. - (3) ATTENTION : Sans cette étape, l'API plantera avec une récursion infinie.
0.5 - Amélioration de la gestion des chemins non trouvés
Nous remarquons que findPath(Vertex origin, Vertex destination) de DijkstraPathFinder renvoie null si le chemin n'est pas trouvé. Ceci induit une réponse vide au niveau de l'API qui ne sera pas facile à interpréter par le client.
En comparaison, le cas où le sommet de départ ou d'arrivé est mieux géré grâce :
- Au renvoi d'une
NotFoundExceptiondansGraph.findVertex(id: String)dans le cas où le sommet n'est pas trouvé par son identifiant - A la personnalisation du rendu des
NotFoundExceptionviaconfig.CustomErrorHandler
Nous procédons de même pour les chemins non trouvés comme suit:
- Adapter
findPath(Vertex origin, Vertex destination)deDijkstraPathFinderpour renvoyer uneNotFoundExceptionavec le modèle de message suivant dans"Path not found from '%s' to '%s'". - Adapter les tests pour traduire ce changement de comportement.
0.6 - Création d'un modèle dédié aux noeuds de l'arbre du plus court chemin
Nous constatons que Vertex est porteur de propriétés qui ne correspondent pas à la modélisation d'un réseau routier mais à l'algorithme de calcul du plus court chemin : cost, reachingEdge et visited.
Ceci a un lourd impact sur l'application : Il est en l'état impossible de lancer en parallèle deux calculs de plus court chemin car il y a aurait des conflits en édition sur les propriétés des Vertex pendant l'exécution de l'algorithme.
Nous procédons dans un premier temps comme suit pour refondre DijkstraPathFinder en limitant les reprises de code à effectuer :
- Création d'une classe
PathNodecorrespondant à un noeud de l'arbre - Migration des attributs
cost,reachingEdgeetvisiteddeVertexversPathNode - Ajout d'une propriété
nodes: Map<Vertex,PathNode>dansDijkstraPathFinder - Mise à jour de
initGraphdansDijkstraPathFinderpour initialisernodes - Ajout d'une méthode utilitaire
getNode(vertex: Vertex): PathNodedansDijkstraPathFinder - Mise à jour du reste du code de la classe
DijkstraPathFinderà l'aide degetNode
0.7 - Création d'un modèle dédié à l'arbre du plus court chemin
Nous encapsulons nodes: Map<Vertex, PathNode> de DijkstraPathFinder sous forme d'un arbre de plus court chemin nommé PathTree :
- Création de la classe
PathTree - Migration des éléments correspondant de
DisjktraPathFinderversPathTreeinitGraph(origin)devientPathTree(graph: Graph, origin: Vertex)buildPath(vertex)devientpathTree.getPath(destination: Vertex)getNode(vertex)devientpathTree.getNode(vertex: Vertex)
0.8 - Stockage des seuls sommets atteints dans PathTree
Nous remarquons qu'il est inutile de stocker des PathNode pour tous les sommets du graphe, qu'il suffit d'initialiser la liste des nodes avec l'origine des chemins et de créer les PathNode quand on atteint de nouveaux sommets.
A l'exception du test pour savoir si on a atteint la destination dans DijkstraPathFinder, les appels à getNode correspondent à des sommets atteints.
Nous procédons donc comme suit :
- Ajouter une méthode
pathTree.isReached(destination: Vertex): booleanpour clarifierdestination.getCost() != Double.POSITIVE_INFINITY. - Blinder de
pathTree.getPath(destination)dans le cas où le sommet n'est pas atteint. - Ajouter une méthode
getOrCreateNode(vertex)dansPathTreeet l'utiliser dansDijkstraPathFinder - Reprendre le constructeur
PathTree(graph, origin)enPathTree(origin) - Ajouter
pathTree.getReachedVertices(): Collection<Vertex>et parcourir ces seuls sommets atteints dansfindNextVertexdeDijkstraPathFinder.
0.9 - Optimisation du chargement du graphe
En chargeant ROUTE500 complet, nous observons un temps de chargement excessivement long. A l'aide de VisualVM, nous constatons que le programme passe le plus clair de son temps dans GraphReader.getOrCreateVertex qui fait appel à Graph.findVertex(coordinate: Coordinate) :
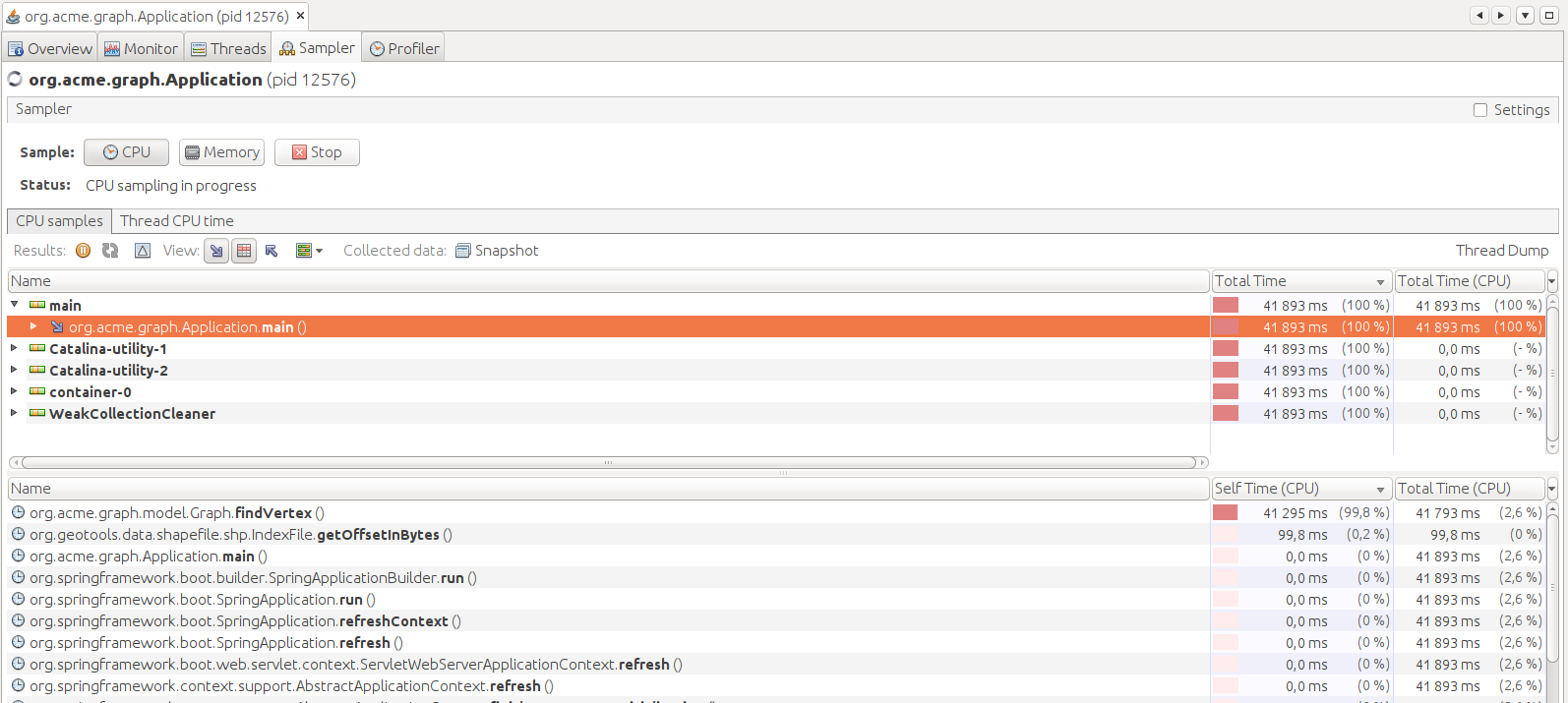
En inspectant Graph.findVertex(coordinate: Coordinate), nous remarquons un parcours complet des sommets à la recherche d'une égalité stricte de coordonnée. Cette approche est loin d'être optimale, nous pouvons optimiser en utilisant une Map<Coordinate, Vertex>.
0.10 - Optimisation du temps de calcul
En lançant des calculs de plus court chemin sur le graphe ROUTE500 complet, nous remarquons un temps de calcul trop important. A l'aide de VisualVM, nous constatons que le programme passe le plus clair de son temps dans findNextVertex :
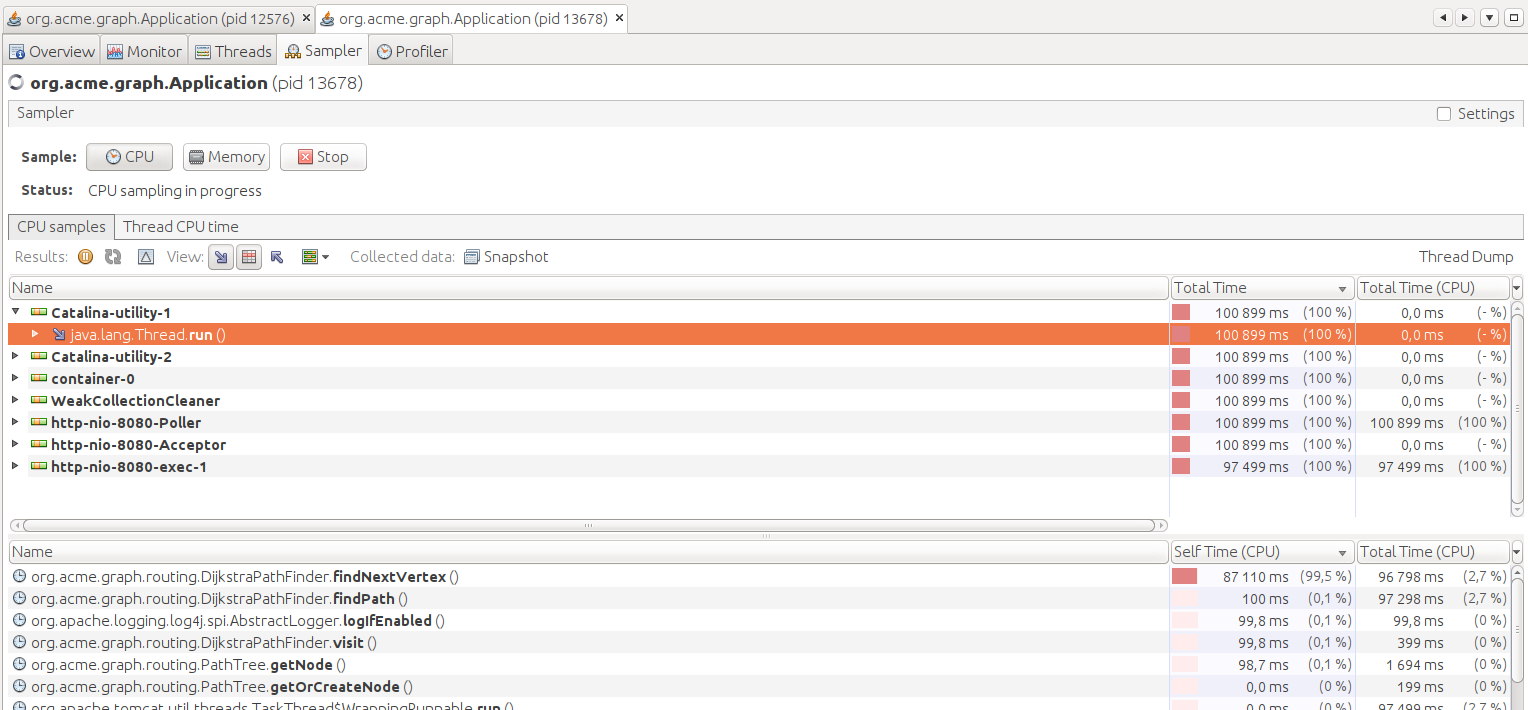
En regardant de plus près findNextVertex, nous remarquons que nous parcourons l'ensemble des sommets atteints pour filtrer ensuite les sommets déjà visités :
for (Vertex vertex : pathTree.getReachedVertices()) {
PathNode node = pathTree.getNode(vertex);
// sommet déjà visité?
if (node.isVisited()) {
continue;
}
//...
Nous allons donc nous appuyer sur la bibliothèque CQEngine (1) pour obtenir une collection de PathNode avec un indexe multiple ((visited,cost)) au niveau du PathTree comme suit :
- Ajouter
vertex: VertexsurPathNode - Remplacer la
Map<Vertex,PathNode>par uneIndexedCollection<PathNode> nodessurPathTree - Ajouter
markVisited(vertex)surPathTree(2) - Ajouter
setReached(vertex,reachingCost,reachingEdge)surPathTree(2) - Ajouter
getNearestNonVisitedVertex(): VertexsurPathTree - Utiliser
getNearestNonVisitedVertex()dePathTreedansfindNextVertex()deDijkstraPathFinder
Remarque :
- (1) Une démonstration de l'utilisation de CQEngine est présente dans les tests : CqEngineTest
- (2) Pour que les indexes se mettent à jour lors des modifications des
PathNode, il faut supprimer lePathNodede la collection, modifier lePathNodeet le ré-ajouter à la collection.
0.11 - Calcul d'isochrone
Nous allons procéder comme suit pour ajouter une fonctionnalité de calcul d'isochrone :
- Ajouter un modèle
Isochroneavec deux propriétés :radius: doublecorrespondant à la distance de calcul de l'isochrone.geometry: Polygoncorrespondant au polygone englobant les sommets atteints.
- Ajouter une méthode
findIsochrone(origin: Vertex, radius: double): IsochronedansDijkstraPathFinder - Ajouter une méthode
RoutingControllerpour mettre à dispositionfindIsochronesous la forme suivante :/api/isochrone?origin={originId}&radius={radius}
Pour le calcul du polygone dans findIsochrone, nous procéderons comme suit :
- Par rapport à
findPath, nous arrêterons la visite des sommets quand le sommet à visiter (current) sera atteint avec un coût dépassant la distance de calcul de l'isochrone (radius) - Nous utiliserons ConvexHull de JTS pour calculer le polygone à partir des coordonnées des sommets atteints avec un coût inférieur
radius(1).
Remarques :
- (1) Il n'est pas requis d'utiliser des fonctionnalités de référencement linéaire pour trouver les coordonnées de points correspondants strictement à
radius(pour une isochrone plus précise, il faudrait étudier lesPathNodeatteints avec un coût supérieur àradiuset pour lesquelsnode.cost - node.reachingEdge.length < radius)
0.12 - Démonstrateur pour les isochrones (Bonus)
Améliorer le démonstrateur pour permettre l'utilisation des deux fonctionnalités suivantes :
- Calcul de plus court chemin
- Calcul d'isochrone
Remarques : Vous pouvez aussi améliorer les contrôles pour mieux présenter la sélection du point de départ et d'arrivé, le lancement et la fin des traitements,...